Los sensores constituyen el sistema de percepción del robot. Esto es, facilitan la información del mundo real para que los robots la interpreten.
Los más utilizados son:
Sensor de proximidad: Detecta la presencia de un objeto de tipo metálico o de otro tipo.

Sensor de Temperatura: Capta la temperatura del ambiente, de un objeto o de un punto determinado.

Sensores magnéticos (brújula digital): Capta la variación de campos magnéticos. Entre sus aplicaciones está la orientación de robots autónomos, exploradores, etc.

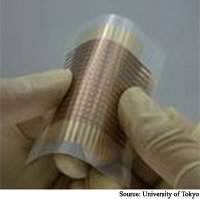
Sensores táctiles, piel robótica: Sirven para detectar la forma y el tamaño de los objetos que el robot manipula. La piel robótica se trata de un conjunto de sensores de presión montados sobre una superficie flexible.
Sensores de iluminación: Capta la intensidad luminosa, el color de los objetos, etc. Es muy útil para la identificación de objetos. Es parte de la visión artificial y en numerosas ocasiones son cámaras.

Sensores de velocidad, de vibración (Acelerómetro) y de inclinación: Se emplean para determinar la velocidad de actuación de las distintas partes móviles del propio robot o cuando se produce una vibración. También se detecta la inclinación a la que se encuentra con respecto a la gravedad el robot o una parte de él.El acelerometro, de eje duplo capaz de medir la aceleración dinámica (vibración) y la aceleración estática (gravedad) con un rango de ±2 g.

Sensores de presión: Permiten controlar la presión que ejerce la mano del robot al coger un objeto.

Sensores de sonido: Se trata de un micrófono con el que poder oír los sonidos.

Microinterruptores: Se trata de múltiples interruptores y finales de carrera muy utilizados.
